Columbia Engineering Celebrates Star Wars Day
In celebration of Star Wars Day, we spoke with three Columbia engineers about some iconic technologies from a galaxy far, far away. Helen Lu discusses the science behind science fictional medicine; Alex Battey explains the physics behind lightsabers, and Matei Ciocarlie shows how to build a better droid hand.
Star Wars and the Next Regeneration
Even in Star Wars’ world of medical droids and robotic limbs, one healing technology stands out as particularly inspired: bacta, a bacteria-based substance with regenerative properties which can miraculously heal just about any injury.
It’s an intriguing premise, but could this bit of science fiction have any basis in science?
Helen Lu, a professor of biomedical engineering, heads up the Biomaterials and Interface Tissue Engineering Laboratory. An expert in regenerative medicine, Lu’s research focuses on repairing one of the most complex types of injuries: soft tissue damage. Her work harnesses innate cell mechanisms to heal and regenerate joints and other intricate systems composed of ligaments, bone, muscle and cartilage. She explains what’s so impressive about bacteria, how bacta is an unlikely magic bullet, and why we can’t regrow the human hand—yet.
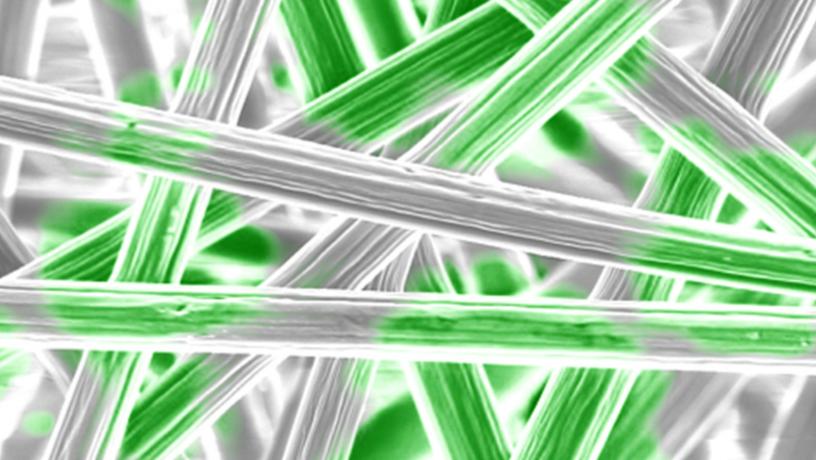
Polymer nanofibers (gray) with cartilage cell area (green) overlayed
Fluorescent imaging of calcium signaling by cartilage cells on graphite-polymer composite fibers

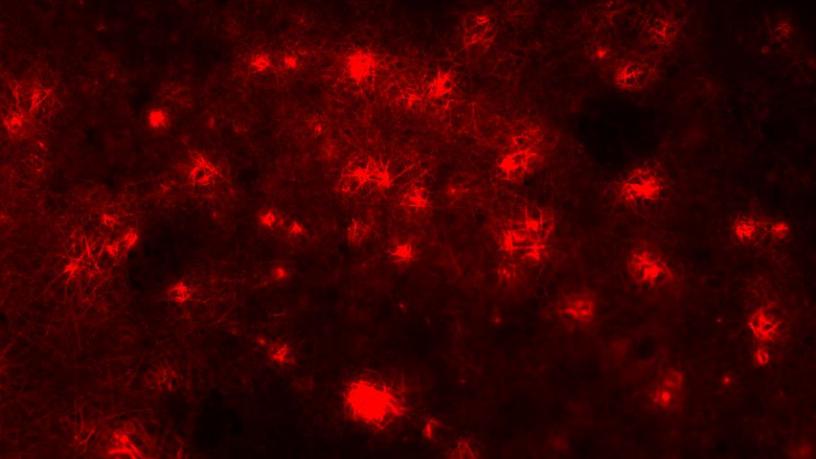
A cartilage-bone construct stained for key extracellular matrix components (red = cartilage , blue = bone)
Did Star Wars, or science fiction in general, influence your decision to pursue a career in scientific research? Does the genre ever spark your scientific imagination?
Helen Lu: No to the first question, because I didn’t see Star Wars until I was in college, after I came to the US. Those movies definitely weren’t shown in the remote part of China where I grew up.
Yes to the second part, especially in Episode V, The Empire Strikes Back, after Luke lost his hand and a prosthetic was made for him—just like that, by a medical droid. There are actually tons of limbs lost in Star Wars. I did notice that his new hand was a mechanical hand; evidently regrowing a biological one is still a grand challenge even in the Star Wars universe, just like in ours. Our hands are a great example of the complex tissue systems found in a healthy musculoskeletal organ system where our muscles, tendons, and bones work together to enable all physical activity, from dancing a pas de deux to folding laundry. My lab studies different interfaces, such as those found in the knee that connect ligament to bone, tendon to bone, cartilage to bone, or in the mouth, the periodontal ligaments that anchor the tooth. By understanding how tissues connect with each other, we can build composite or complex tissue, sort of like Legos for tissues, but strong enough to make sure you can enter the New York marathon.
Progress here requires understanding the mechanisms that govern regeneration. We’re working under the hypothesis that cellular communications play a key role in this process. As such, we create bio-inspired materials to act as “scaffolds” in the body that can coach cells to behave in a certain way, enabling the formation of intricate tissues and tissue integration.

Luke Skywalker floats in a bacta tank to heal the injuries he sustained on Hoth in Star Wars: The Empire Strikes Back
In the Galaxy Far Far Away, bacta can cure just about anything. In reality, will we ever find one such substance that can solve multiple medical issues?
HL: It will be hard to find that kind of magic bullet. Just like the many facets of the Force in Star Wars, our body is so beautifully complex, activated by intricate and interdependent processes that are seamlessly orchestrated so that we can explore our full human potential, mentally and physically. In other words, our cells work as a community and are dependent upon each other. That makes it hard for one type of cell to be singled out as more important than another for a healthy and full life—and this becomes even more complicated when you think about how much our bodies change over our lifetimes, or just from morning to evening.
I find the idea of bacta super interesting, however. It’s intriguing because in that example the regeneration taking place is cell-driven, in this case the cell being bacteria. Bacteria are amazing because they are single-cell organisms, i.e., they pack a whole life story from beginning to end into a single, tiny cell, just 1-2 microns long. Over the past 30 years, the field of tissue regeneration has found that engineering cell responses and guiding them towards functional tissues is crucial. One way we do this is by creating scaffolds, which could take the form of a solution or mesh that stimulates the cells. Engineering the right scaffold is key.
In my lab, some of our research centers on harnessing the power of bacteria to rapidly replicate and produce a matrix that can be used for tissue regeneration. It’s a great example of the amazing versatility of living systems. In this project, one of our PhD students, Romare, is working on a collaboration with fellow research scientist Theanne Schiros to develop bacteria-produced biotextiles. These biotextiles could be a sustainable alternative to leather for the textile industry. But these same systems are capable of being used as scaffolds for promoting the cell-mediated tissue regeneration of ligaments inside the body.
Lightsabers aside, what are the biggest needs in regenerative medicine? Is there a role for regenerative medicine in the face of a disease like Covid-19?
HL: Certainly. For example, Covid-19 has been shown to attack T-cells, which are a big focus in regenerative medicine. In the area of cancer research, we’ve been working with fellow biomedical engineering Professor Lance Kam, to help develop an ex-vivo T-cell expansion platform using microfibers. These microfibers accelerate cell division to create a supply of T-cells that can be injected back into the body to treat the disease.
What Star Wars tool do you wish you had in your lab?
HL: I could think of a lot of uses for a lightsaber.
What will a regenerated human look like 10 years from now?
HL: In the coming decade, machine learning and informed design can play a great role in helping us create new materials or better utilize known materials capable of guiding cell response. If that happens, one day we may in fact be able to regrow a human hand.
Also, there’s great progress coming on scar-less healing, another cell-driven regeneration process directed and accelerated by scaffolds. To do that, we’ll need to orchestrate cell types to activate at different times, so for example, first you’d modulate immune responses to clear debris, then you’d accelerate true healing through progenitor cells. That would take us into the 4th dimension in tissue engineering.
Lightsaber Physics with Columbia Engineering
Ever wonder how lightsabers work? Watch how plasma physics make these signature Star Wars weapons possible -- in every color of the rainbow.
PhD student Alex Battey explains the physics behind lightsabers.
To feel the Force, first sense a force: New tactile fingers for robot hands
In the Star Wars franchise, both Luke Skywalker and his father are depicted using highly advanced robotic hands with no loss of dexterity or sensitivity. Here on Earth, a robotic device with that level of sensorial acuity has long been beyond our reach. Mechanical engineer Matei Ciocarlie, a roboticist developing smart machines, and electrical engineer Ioannis Kymissis, head of the Laboratory of Unconventional Electronics, are working with students Pedro Piacenza and Keith Behrman to change that. Last month, the group unveiled new research that dramatically increases the dexterity of robotic hands by refining their ability to sense pressure. Their work brings us that much closer to a day when prosthetics behave like the real thing. Below, Matei Ciocarlie describes the group's research in greater detail.
Robot hands are generally ill-equipped to feel the Force, or even its much more mundane counterpart, a force. In a nutshell, that sums up one of the biggest obstacles to creating artificial limbs that are as skillful as biological ones: today’s robot hands are very limited when it comes to sensing touch, and the forces it can transmit between objects.
Yes, engineers can build touch sensors and devices for measuring an applied pressure, known as force transducers (though Force transducers are still proving elusive). But there is a big difference between a touch sensor and a tactile finger: the latter needs to provide rich touch sensation over complex three-dimensional surfaces with few or no blind spots, be robust to repeated contact, and come as a compact package that can be integrated with and wired to a hand.
The human hand is a technological marvel in many ways, and touch sensing is one of them. Every human fingertip contains more than one thousand tiny touch sensors (mechanoreceptors), tuned to respond to different kinds of touch. All of these sensors are wired back to the nervous system, reading information and making decisions based on it. Somehow, all of these tiny wires never get crossed. The hand is driven by more than 40 muscles, most of them housed in the forearm, and transmitting forces to the fingers via a complex network of tendons sliding effortlessly over lubricated routes. Each of these muscles can sense and regulate how much force it is applying to the world.
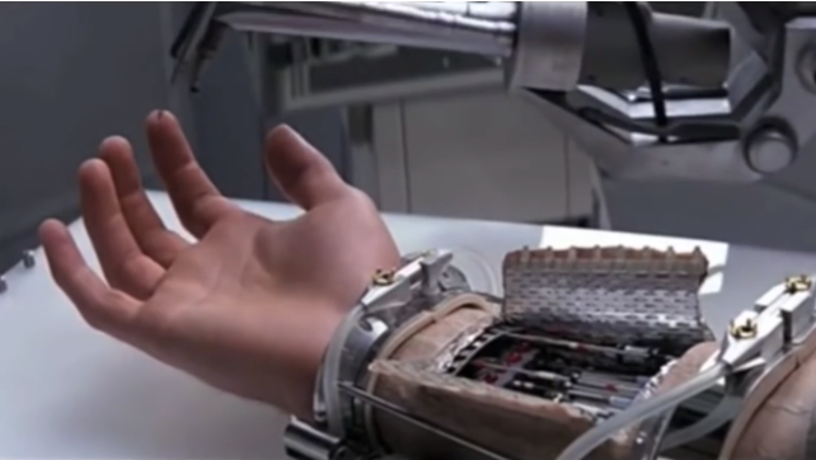
After losing his hand in a lightsaber duel with Darth Vader, Luke Skywalker received a robotic prosthetic, which looked remarkably like the original...on the outside, at least.
The situation is much different for robots. Absent tactile sensing, most of today’s robotic grippers rely exclusively on cameras to gather information about the world. While this paradigm is effective in many settings, it falls short in others: cameras tell you very little about the interaction forces between bodies, and fail altogether if the hand itself occludes the object being manipulated from the camera.
Finding this current state of the art insufficient, we set out to build a new type of tactile robotic finger. We use light to sense touch: the inside of the finger contains a soft and transparent elastomeric layer, about 7 mm thick. Inside this layer, we have many light sources (LEDs) and light measuring terminals (photodiodes). Whenever the finger touches anything, the transparent layer deforms, changing the way light behaves inside. Our diodes can record this change, and relay it upstream. Overall, the finger generates about 1,000 raw signals (by measuring light transport between every LED and every diode). This rich data set is then processed by a deep neural network, aiming to infer things like where the touch occurred, and how much force was transmitted. There are really two ideas that make this finger tick: generate data that learning algorithms can make sense of (even if people can not), and use light as the basic force transducer. As Master Yoda once said, “luminous beings are we, not this crude matter.”

"Luminous robot fingers make we, not out of some crude matter"

Master Yoda was one of the most powerful of all the Jedi, proving you don’t need four fingers and a thumb to make an effective hand.
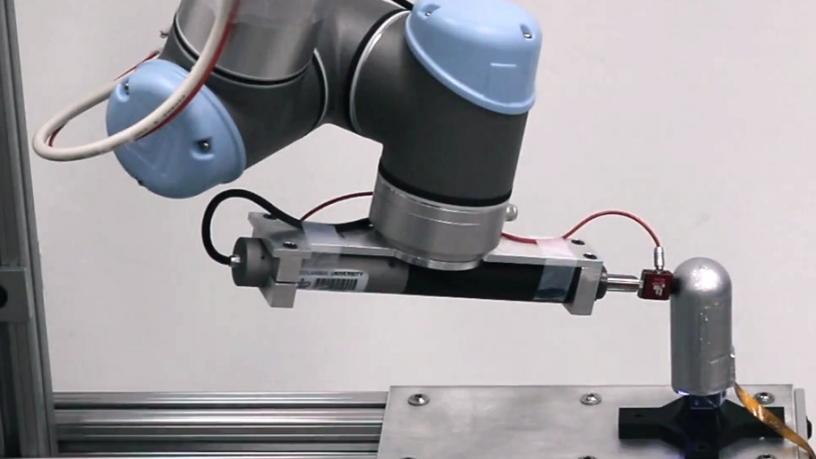
Speaking of Master Yoda, we have constructed a robot hand equipped with three tactile fingers. (Previous studies established long, long ago that a three-fingered hand is applicable to common manipulation tasks, such as lifting small spacecraft from swamps.) We are now working on developing manipulation algorithms that use such data. We hope to apply results to other fields, ranging from manufacturing to e-commerce and healthcare, all of which stand to benefit from dexterous robotic manipulation.

Like Master Yoda’s, our robot hand is also equipped with three fingers, and is force-sensitive
Maybe one day we can even pay the ultimate homage to the human hand by building a sensorized, dexterous prosthetic replacement. Such work is still in its infancy: a “smart” prosthetic must provide an incredibly high level of functionality to compensate for the fragility, difficulty of use, and cost that often go hand-in-hand with complexity. Still, multiple laboratories around the world are exploring ways to re-create the sensation of touch for amputees, by installing tactile sensors on a prosthesis and finding ways to convey that information to the nervous system. Our tactile fingers could one day be used in the same way.
Just like Luke’s prosthetic fingers, ours need a robot’s touch to “get them started”
Jedi Masters use the Force to move objects without even touching them. We will settle for robot hands that do touch objects, and move them by applying a force the old-fashioned way. But, in order to truly make a difference, they will have to sense their way through it.
Scientific paper authors: Pedro Piacenza, Keith Behrman, Benedikt Schifferer, Ioannis Kymissis, Matei Ciocarlie
For the true technical details, see journal publication and accompanying video:
https://arxiv.org/abs/2004.00685
https://youtu.be/PVw8Qy7BHU0